Many possibilities to assign a rank \(r(j)\) to feature \(j\)
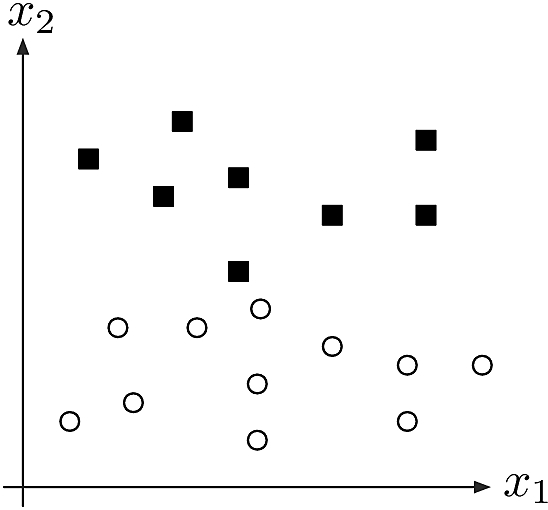
Misclassification rate: \[r(j)\eqdef\frac{1}{N}\sum_{i=1}^N\indic{y_i\neq\theta(x_{i,j})}\quad\textsf{for some classifier}\quad \theta\]
Two-sample t-test statistics: \[r(j)\eqdef \frac{\abs{\overline{x_j^{+}}-\overline{x_j^{-}}}}{s/\sqrt{n}}\] where \(\overline{x_j^{(\pm)}}\) are class means for feature \(j\) and \(s\) is the pooled sample standard deviation
Margin: for separable data, compute \[ r(j)\eqdef \min_{k:y_k=+1,\ell:y_\ell=-1}\abs{x_{k,j}-x_{l,j}}\] or order statistics if data is not separable (to ignore outliers)